







Módulo de Control con Driver Integrado para Motor Stepper – Rendimiento y Precisión en Automatizaciones Industriales
Este módulo de control con driver integrado está especialmente diseñado para motores paso a paso de un solo eje, ofreciendo una solución completa para automatizaciones industriales, control CNC, robótica y sistemas de embalaje mecánico. Funciona de manera independiente o en combinación con otros sistemas, sin necesidad de Arduino o Python, siendo ideal para aplicaciones de control industrial y posicionamiento preciso de motores stepper.
Características principales
- Controlador y Driver Integrado: Controla el motor paso a paso y monitoriza el estado de funcionamiento en tiempo real.
- Rotación Adelante y Atrás: Cambia la dirección de rotación mediante botón o potenciómetro, automáticamente según el modo de trabajo.
- 3 Modos de Control: Modo predefinido, control mediante botones externos o drivers adicionales.
- 9 Programas de Trabajo: Incluye programas para diversas aplicaciones: Adelante/Atrás, Retardo, Bucles, Bloqueo automático, Velocidad de rotación, entre otros.
- Pantalla LCD HD: Muestra la velocidad, número de ciclos y parámetros de control, con función de memoria y alta precisión.
Parámetros técnicos
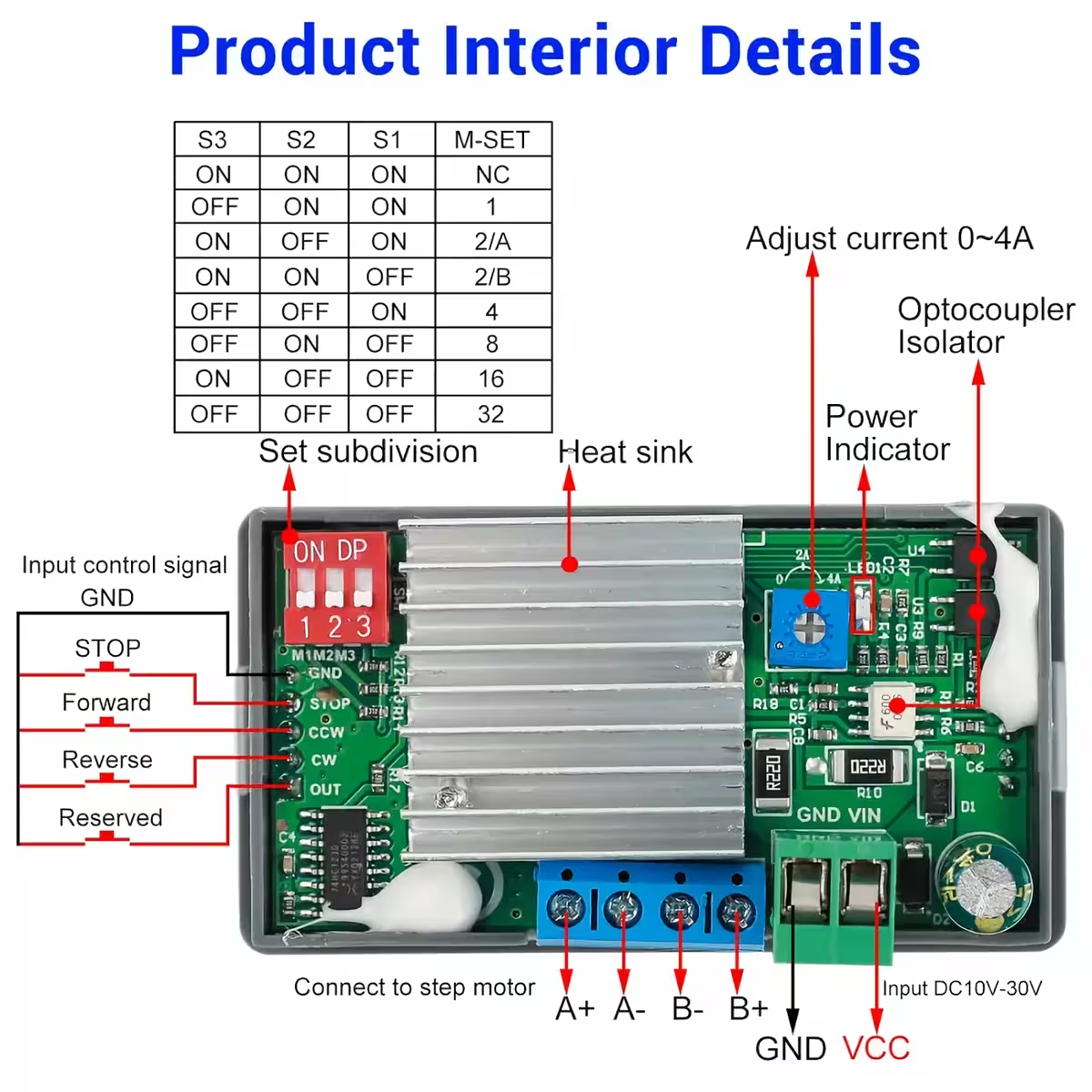
- Tensión de entrada: DC 5V-30V
- Corriente de salida/driver: 4A (máximo)
- Ejes de control: Un solo eje
- Motor compatible: Stepper 42/57 (Nema17 / Nema23)
- Velocidad de control: 0,1-999 RPM
- Número de impulsos adelante/atrás: 1-9.999.999
- Número de ciclos: 1-9.999 o bucle infinito
- Retardo adelante/atrás: 0,0-999,9 segundos
- Subdivisión: 1/2/4/8/16/32
- Control aceleración/desaceleración: Sí
- Protección inversión de polaridad de entrada: Sí
- Modos de control: Automático/Manual/Configuración
- Temperatura de trabajo: -20°C a 85°C
- Humedad de trabajo: 5% a 95% RH
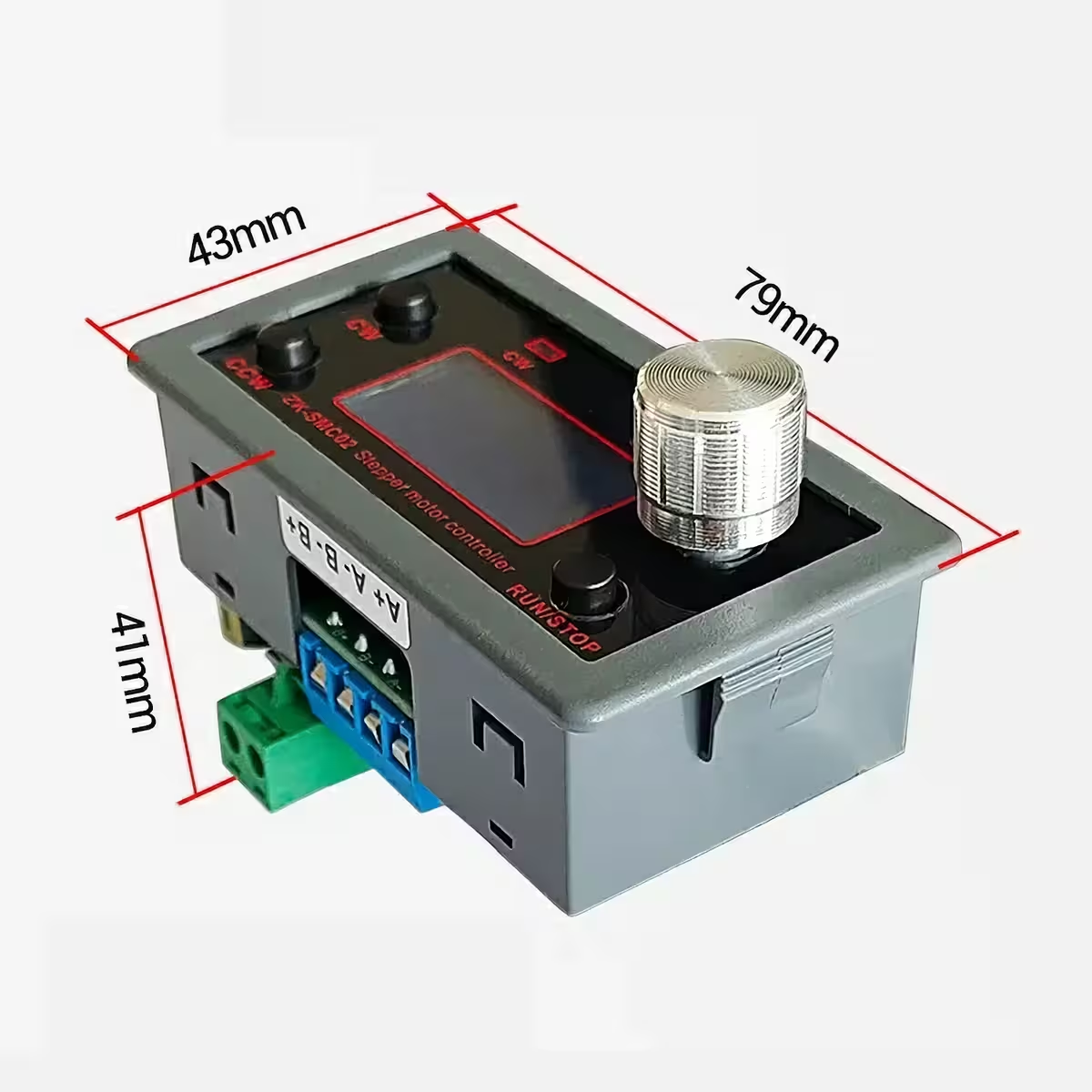
- Dimensiones del módulo: 79 x 43 x 41 mm
Métodos de configuración
1. Interfaz de operación
- La primera línea muestra la velocidad de rotación en RPM.
- La segunda línea muestra el tiempo de retardo o el número de ciclos, configurables mediante el menú F-10.
- Botón CW: rotación adelante.
- Botón CCW: rotación atrás.
- Botón RUN/STOP: inicio/parada.
- Potenciómetro: ajuste de velocidad en ambos sentidos.
- Mantener el potenciómetro >3 segundos: entrar en modo de configuración de parámetros.
2. Interfaz de parámetros
- Girar el potenciómetro selecciona el parámetro F-01~F-13.
- El parámetro seleccionado parpadea.
- Presionar el potenciómetro selecciona el valor.
- Cambiar el valor girando el potenciómetro o seleccionando los bits.
- Botón RUN/STOP confirma los parámetros.
- Guardar y salir del modo de configuración después de >3 segundos.
3. Función auxiliar
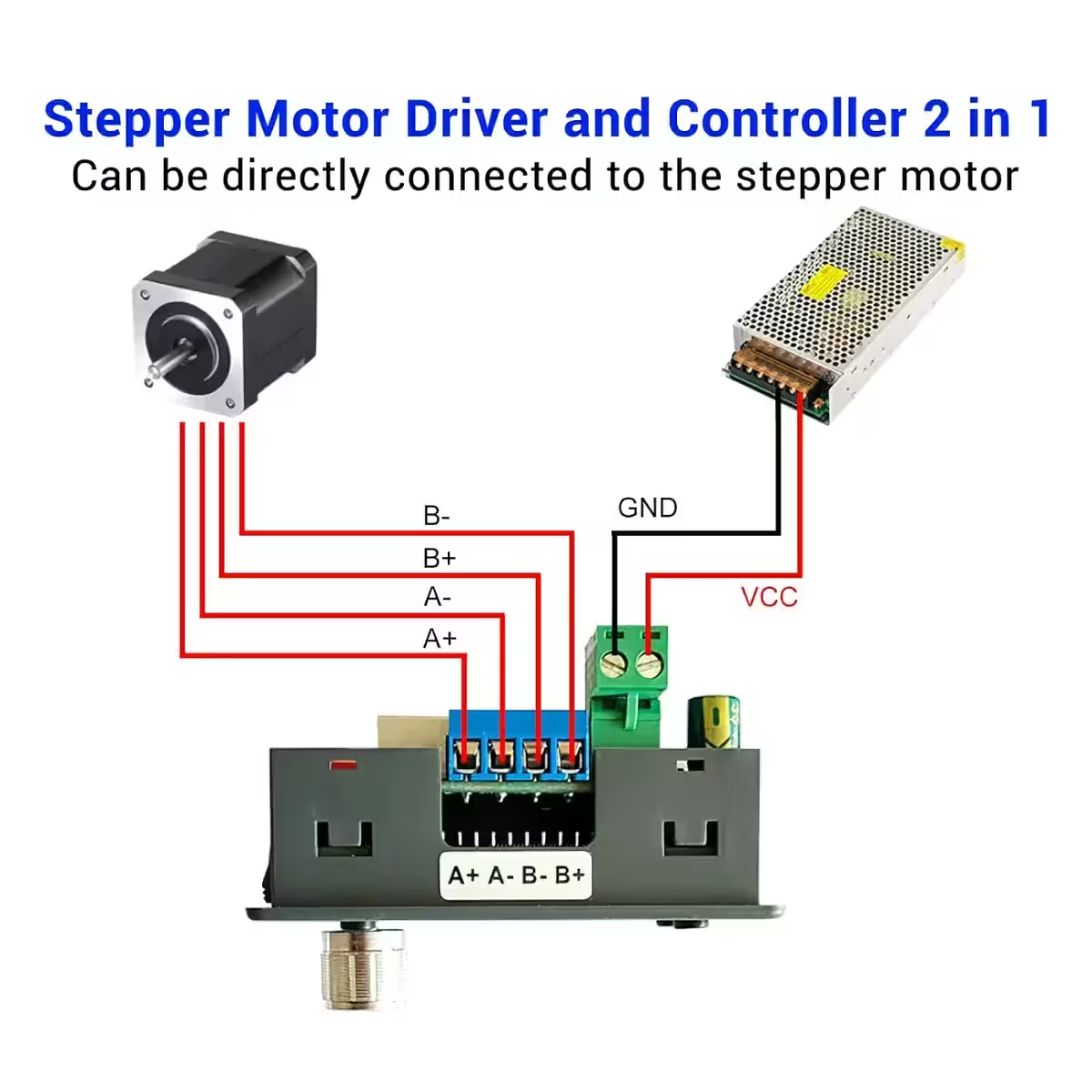
- Funcionamiento independiente conectando solo la alimentación y el motor.
- Posibilidad de conectar botones externos para control adicional.
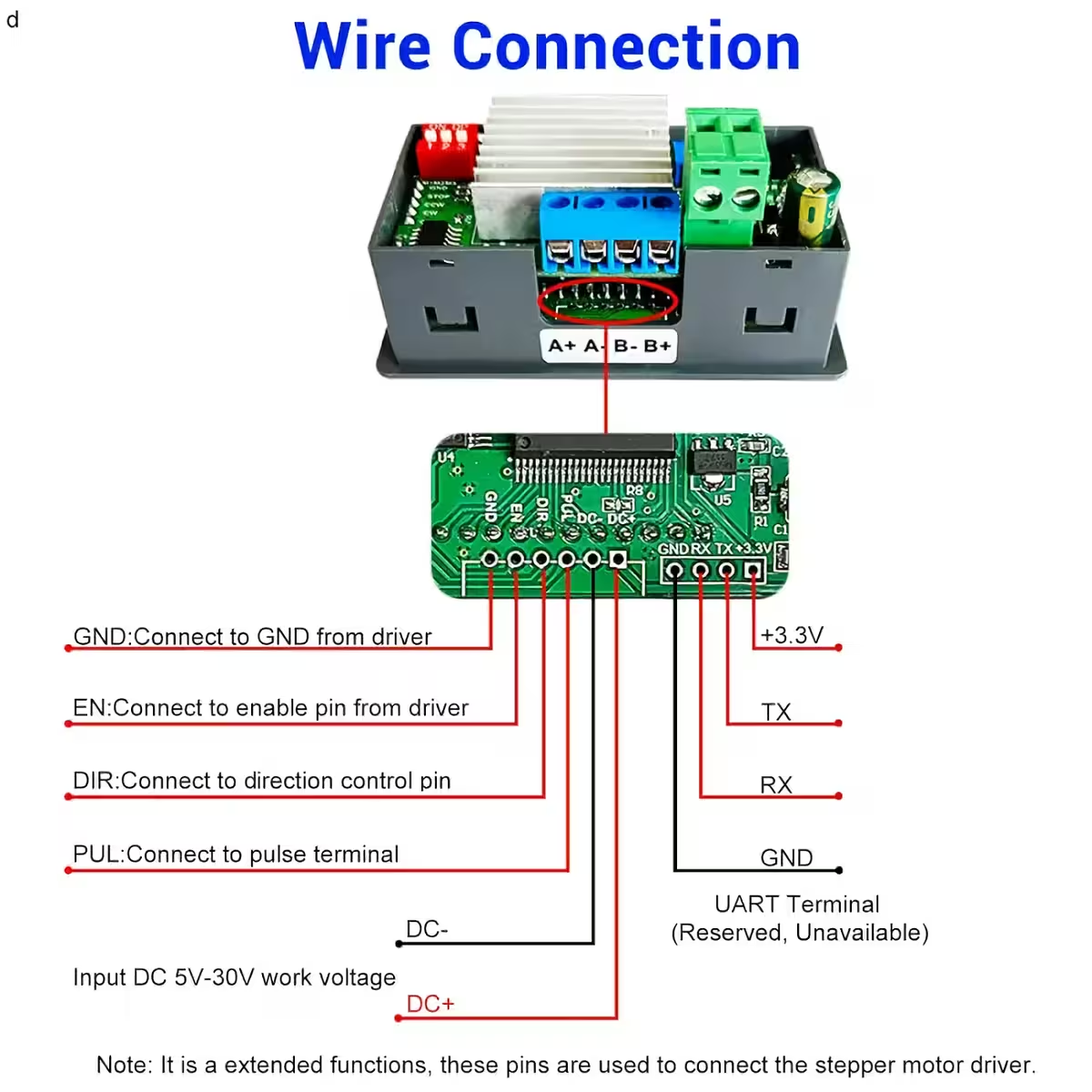
- Compatible con otros drivers de motores stepper – modos Auto/Manual/Setup.
4. Modos de trabajo
- Modo de Control Automático: funciona con los parámetros configurados.
- Modo de Control Manual: requiere conectar los botones a los terminales COM/STOP/CCW/CW.
- Modo de Configuración: conexión a otros drivers para motores stepper.
Notas importantes
- Compatible con motores paso a paso de 2 fases, sin importar el número de cables (4, 5, 6 u 8).
- Incluye drivers y controladores integrados, pero también puede conectarse a otros drivers externos.
Aplicaciones
- Control automatizado industrial
- Máquinas CNC
- Embalaje mecánico
- Procesamiento y pruebas electrónicas
- Líneas de ensamblaje automático
- Robótica y automatización de procesos
- Sistemas de posicionamiento y movimiento
| Parámetro | Función | Rango de Configuración | Valor por Defecto |
|---|---|---|---|
| F-01 → ? | Seleccionar modo de trabajo. Consulte la tabla siguiente. | P01~P09 | P01 |
| F-02 | Número de impulsos adelante. Cambio del bit High/Low presionando el potenciómetro: High 3Bit: Hxxx, Low 4Bit: xxxx | 1~9999999 | 1600 |
| F-03 | Velocidad de rotación adelante en RPM | 0.1~999.9 | 10 |
| F-04 | Número de impulsos atrás. Cambio del bit High/Low presionando el potenciómetro: High 3Bit: Hxxx, Low 4Bit: xxxx | 1~9999999 | 1600 |
| F-05 | Velocidad de rotación atrás en RPM | 0.1~999.9 | 10 |
| F-06 | Número de ciclos de trabajo (‘—-’ significa bucle infinito) | 0~9999 o bucle infinito | 1 |
| F-07 | Retardo en posición de avance en segundos. ±0.2s | 0.0~999.9 | 0 |
| F-08 | Retardo en posición de retroceso en segundos. ±0.2s | 0.0~999.9 | 0 |
| F-09 | Número de impulsos para una rotación. La unidad es 10. Por ejemplo, si el ángulo de paso es 1.8 y la subdivisión es 8, el número de impulsos para una rotación es 360/1.8*8 = 1600. Por lo tanto, el valor configurado debe ser 160. | 1~9999 | 160 |
| F-10 | Configura los parámetros de la pantalla LCD: 0: Primera línea muestra la velocidad del motor en RPM. Segunda línea muestra tiempo de retardo en segundos. 1: Primera línea muestra velocidad del motor en RPM. Segunda línea muestra número de ciclos de trabajo. | 0 o 1 | 0 |
| F-11 | Configura el estado de funcionamiento del motor al presionar RUN/STOP: 0: Reducción lenta y parada. 1: Parada inmediata. | 0 o 1 | 0 |
| F-12 | Configura nivel de aceleración/desaceleración: 001 es el más lento y 100 es el más rápido. | 001~100 | 20 |
| F-13 | Configura la dirección del dispositivo | 001~255 | 1 |
| Modo de Trabajo | Proceso de Trabajo |
|---|---|
| F-01 → P01 |
1. El motor funciona con la rotación del potenciómetro. Los demás botones inactivos. 2. El motor gira adelante y se enciende el indicador CW si el potenciómetro se gira en el sentido de las agujas del reloj. 3. El motor gira atrás y se enciende el indicador CCW si el potenciómetro se gira en sentido contrario a las agujas del reloj. |
| F-01 → P02 |
1. El motor gira según los impulsos configurados en F-02 y F-04. 2. El motor se detiene después de cada conjunto de impulsos y puede reiniciarse con el potenciómetro. 3. El bucle se repite según el número de ciclos definido en F-06. |
| F-01 → P03 |
1. El motor gira y se detiene alternadamente según los impulsos definidos. 2. La dirección adelante o atrás se establece según F-02/F-04. 3. Reinicio de velocidad con el potenciómetro. 4. Nota: Detener el motor antes de cambiar la dirección. |
| F-01 → P04 |
1. El motor gira desde F-02/F-04 y se detiene, luego repite el bucle F-06 veces. 2. Dirección adelante: F-02 → paro F-07 → bucle. 3. Dirección atrás: F-04 → paro F-08 → bucle. 4. Reinicio RPM con potenciómetro. 5. Nota: Detener el motor antes de cambiar la dirección. |
| F-01 → P05 |
1. El motor gira desde F-02/F-04, luego retorna al inicio en dirección opuesta y repite el bucle F-06 veces. 2. Dirección adelante: F-02 → paro F-07 → bucle → retorno. 3. Dirección atrás: F-04 → paro F-08 → bucle → retorno. 4. Reinicio RPM con potenciómetro. 5. Nota: Detener el motor antes de cambiar la dirección. |
| F-01 → P06 |
1. El motor gira desde F-02/F-04, luego cambia de dirección y repite el bucle F-06 veces. 2. Dirección adelante: F-02 → paro F-07 → inversión F-04 → paro F-08 → bucle. 3. Dirección atrás: F-04 → paro F-08 → inversión F-02 → paro F-07 → bucle. 4. Reinicio RPM con potenciómetro. 5. Nota: Detener el motor antes de cambiar la dirección. |
| F-01 → P07 |
1. El motor gira según los impulsos y retorna al inicio en dirección opuesta. 2. Dirección adelante: F-02 → paro F-07 → retorno. 3. Dirección atrás: F-04 → paro F-08 → retorno. 4. Reinicio RPM con potenciómetro. |
| F-01 → P08 |
1. El motor gira desde el tiempo de retardo F-07/F-08 y se detiene, luego bucle F-06 veces. 2. Dirección adelante: F-07 → paro F-08 → bucle. 3. Dirección atrás: F-08 → paro F-07 → bucle. 4. Reinicio RPM con potenciómetro. 5. Nota: Detener el motor antes de cambiar la dirección. |
| F-01 → P09 |
1. El motor gira adelante desde F-02, luego se detiene por F-07, luego gira atrás desde F-04 y se detiene por F-08, repitiendo el bucle F-06 veces. 2. Reinicio RPM con potenciómetro. 3. Nota: Detener el motor antes de cambiar la dirección. |










Valoraciones
No hay valoraciones aún.