



Controlador de dirección para motor DC: gestión de movimiento adelante/atrás sin componentes externos
¿Tienes un actuador lineal, un mecanismo reversible o un proyecto DIY que requiere un control preciso de la dirección? Sin un módulo específico, terminarías recurriendo a relés, transistores y un cableado complejo. Este controlador de dirección para motores DC simplifica todo en un único módulo compacto: conecta la fuente, el motor y los pulsadores, y estará listo para funcionar en cuestión de minutos.
Nota: El motor recibe la misma tensión que la fuente de alimentación. La tensión no es regulable a través de este controlador.
¿Por qué elegir este modelo? (Ventajas clave):
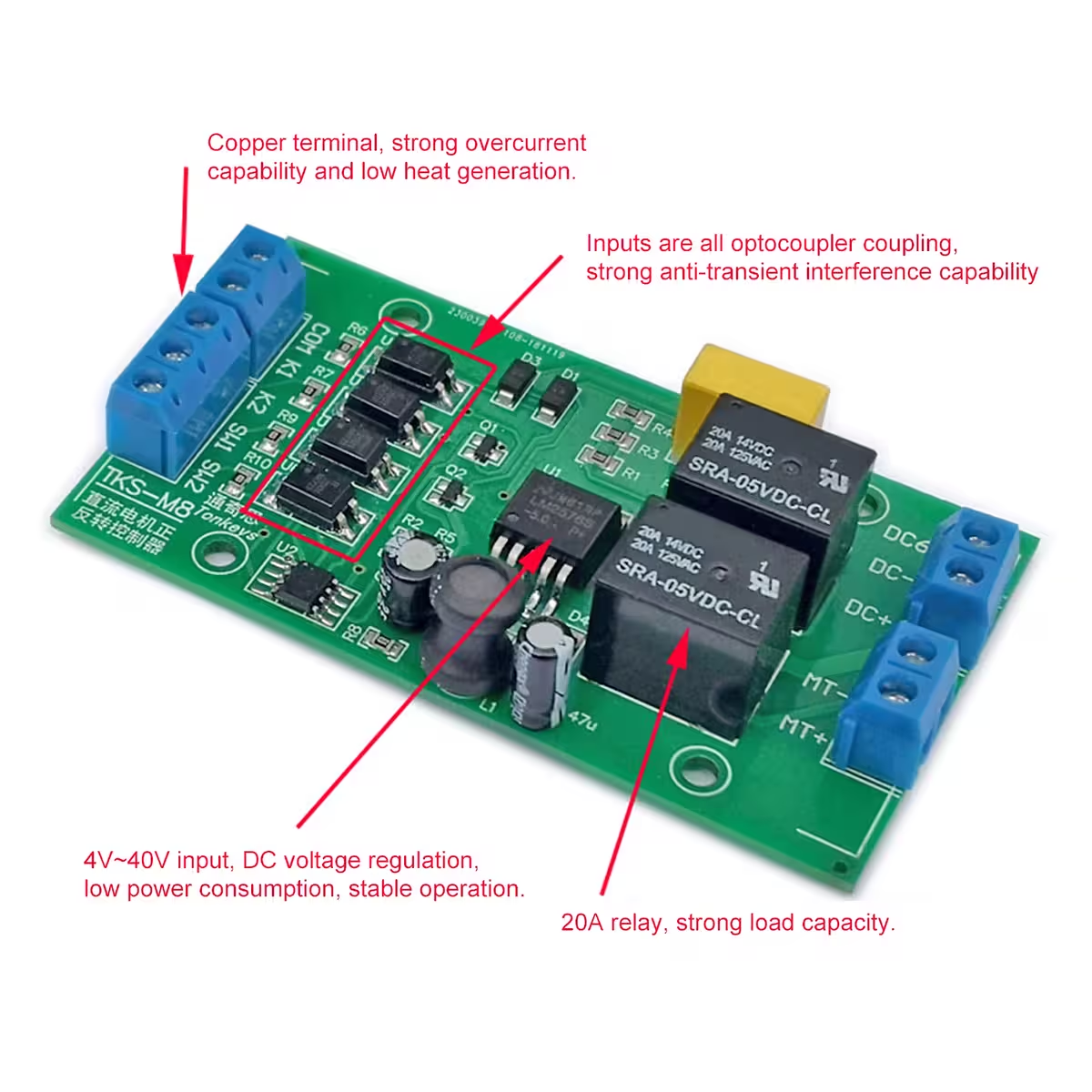
- Amplio rango de voltaje: 4–40V DC — compatible con baterías LiPo, fuentes de alimentación de laboratorio o industriales sin necesidad de modificaciones.
- Corriente de salida de hasta 20A — gestiona motores con picos de arranque elevados, adecuado para cargas de hasta ~80W.
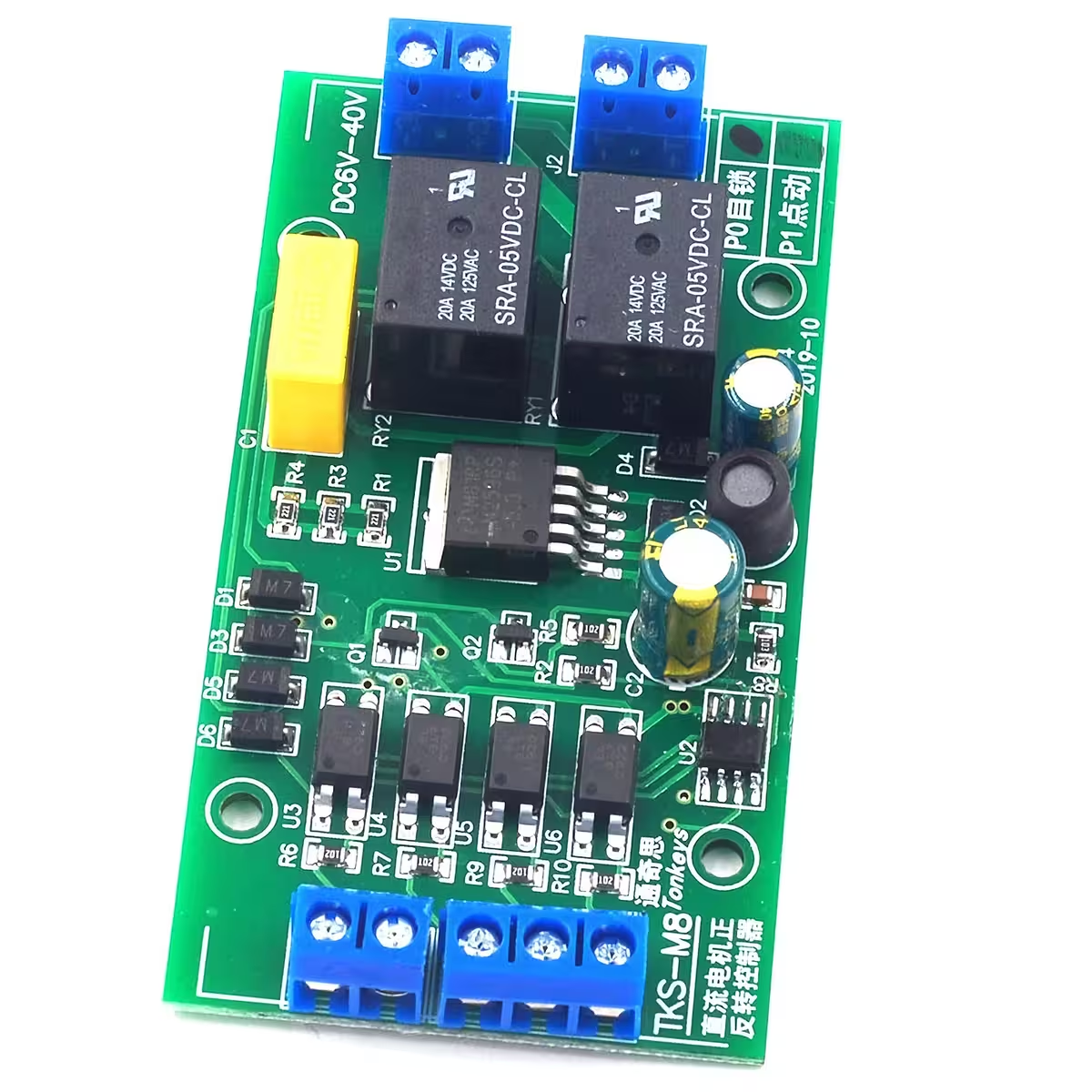
- Dos modos seleccionables: PO y P1 — elige entre auto-mantenimiento (arranque con pulso corto) o modo jog (activo solo mientras mantienes pulsado), según tus necesidades.
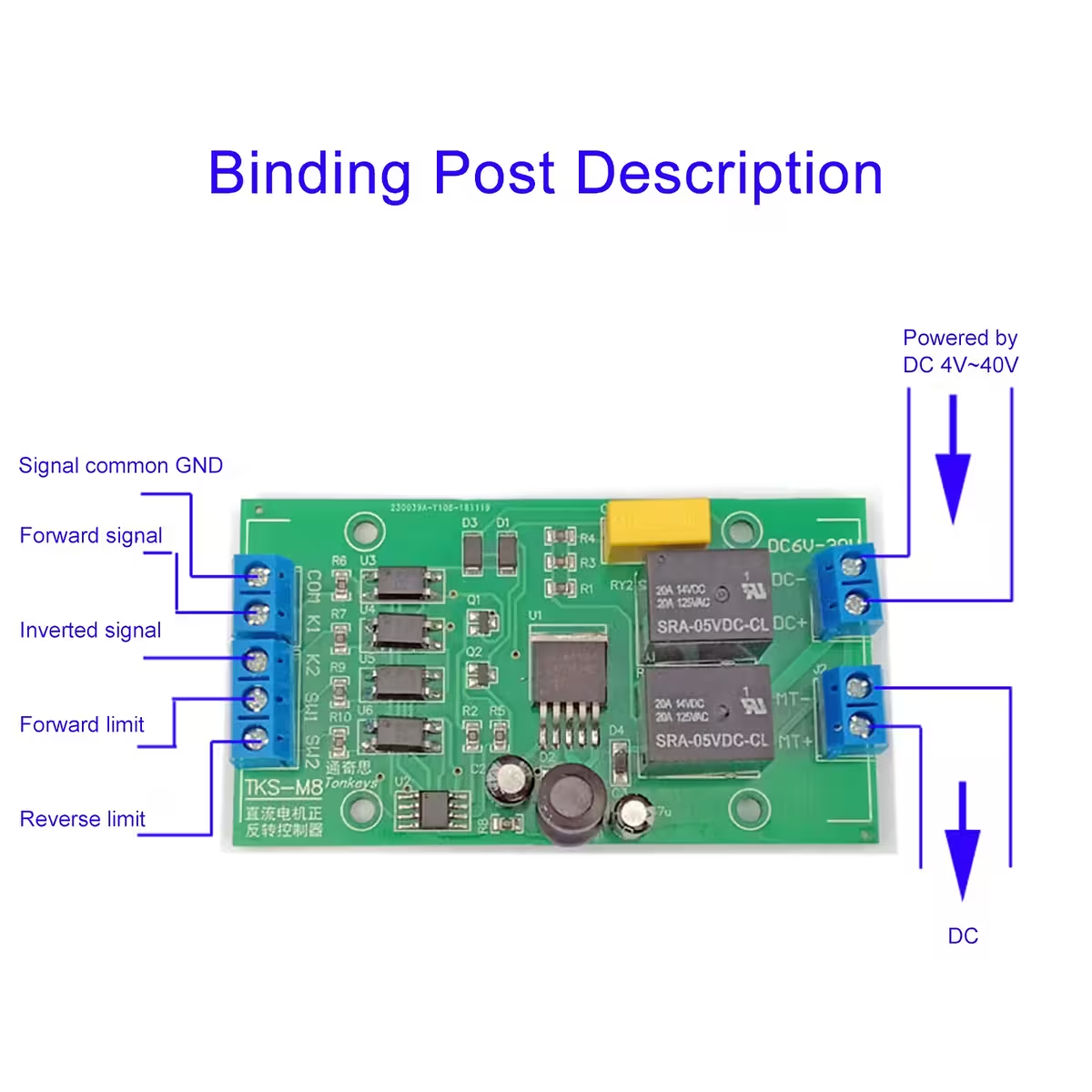
- Entradas universales active-low — conecta directamente pulsadores simples, finales de carrera mecánicos NO o sensores NPN de 3 hilos, sin resistencias ni lógica adicional.
- Finales de carrera integrados SW1/SW2 — parada automática al alcanzar el límite, eliminando el riesgo de bloqueos mecánicos o sobrecargas.
- Vida útil >150.000 ciclos — fiabilidad garantizada para aplicaciones con uso intensivo diario.
- Bajo consumo propio: 0,6W en activo / 0,1W en standby — optimizado para no drenar la batería cuando el sistema está en reposo.
Detalles y rendimiento
El controlador utiliza una arquitectura basada en entradas active-low: una entrada se activa cuando el voltaje cae por debajo de 2V. Esto permite conectar directamente pulsadores estándar, finales de carrera NO (normalmente abiertos) y sensores NPN-NO de 3 hilos sin componentes intermedios.
El tiempo de respuesta es de ≈20ms para los comandos K1/K2 y de ≈50ms para los finales de carrera SW1/SW2, lo suficientemente rápido para aplicaciones dinámicas y estable para evitar activaciones accidentales.
A voltajes más altos, se recomienda ajustar la corriente: a 12V puedes usar hasta 20A, mientras que a 24V se recomienda limitar a ~10A para asegurar una correcta gestión térmica a largo plazo. Utiliza siempre un fusible dimensionado correctamente y cables adecuados a la carga.
| Parámetro | Valor / Detalle |
|---|---|
| Voltaje de funcionamiento | DC 4–40V (recomendado 6–36V) |
| Corriente máxima de salida | Hasta 20A (a 12V) |
| Potencia del motor recomendada | Hasta ~80W |
| Consumo del módulo (activo) | aprox. 0,6W |
| Consumo del módulo (standby) | aprox. 0,1W |
| Tipo de señal de entrada | Active-low (activo a voltaje < 2V) |
| Tiempo de respuesta K1/K2 | ≈ 20ms |
| Tiempo de respuesta SW1/SW2 | ≈ 50ms |
| Modos de funcionamiento | PO (auto-mantenimiento) / P1 (jog) |
| Vida útil | >150.000 ciclos |
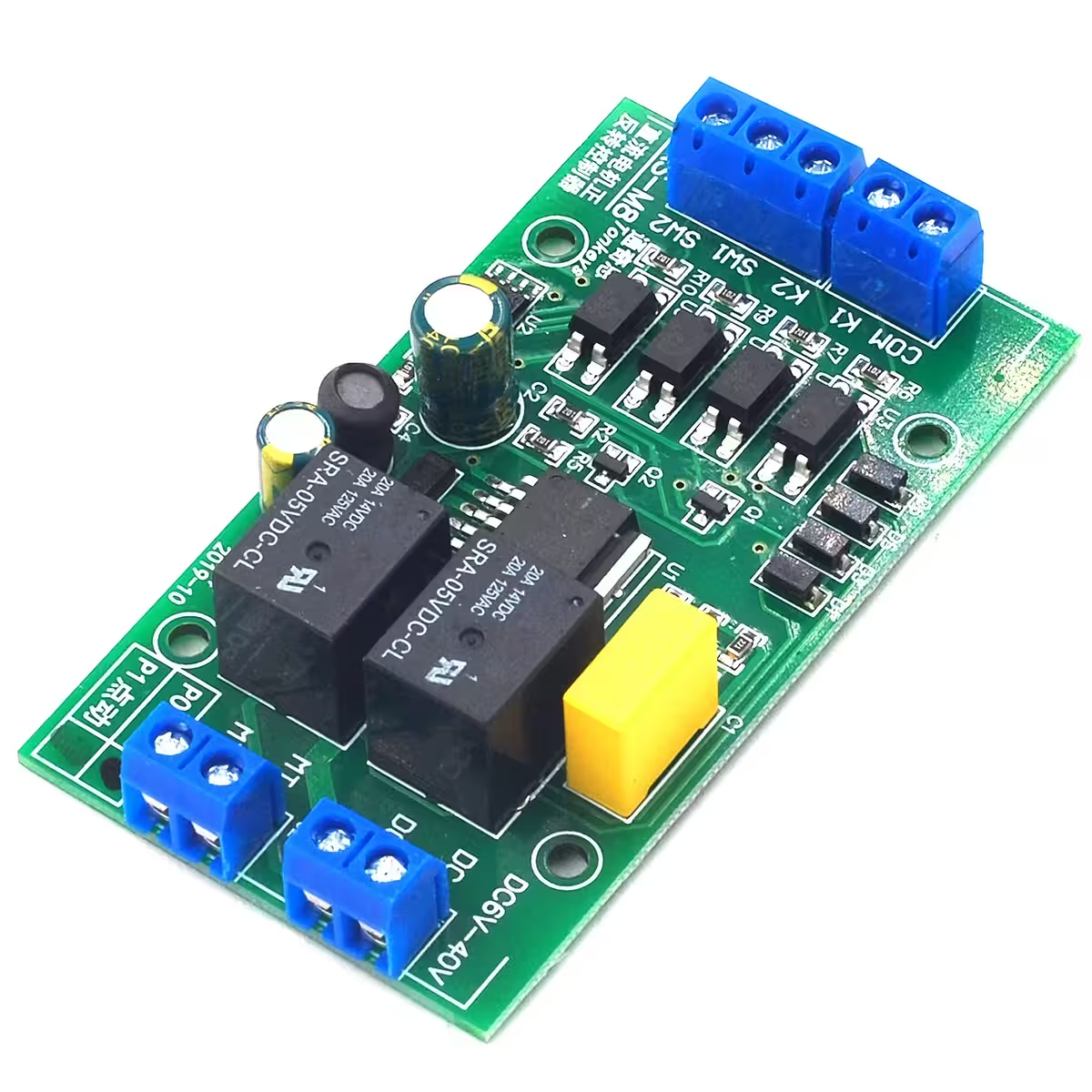
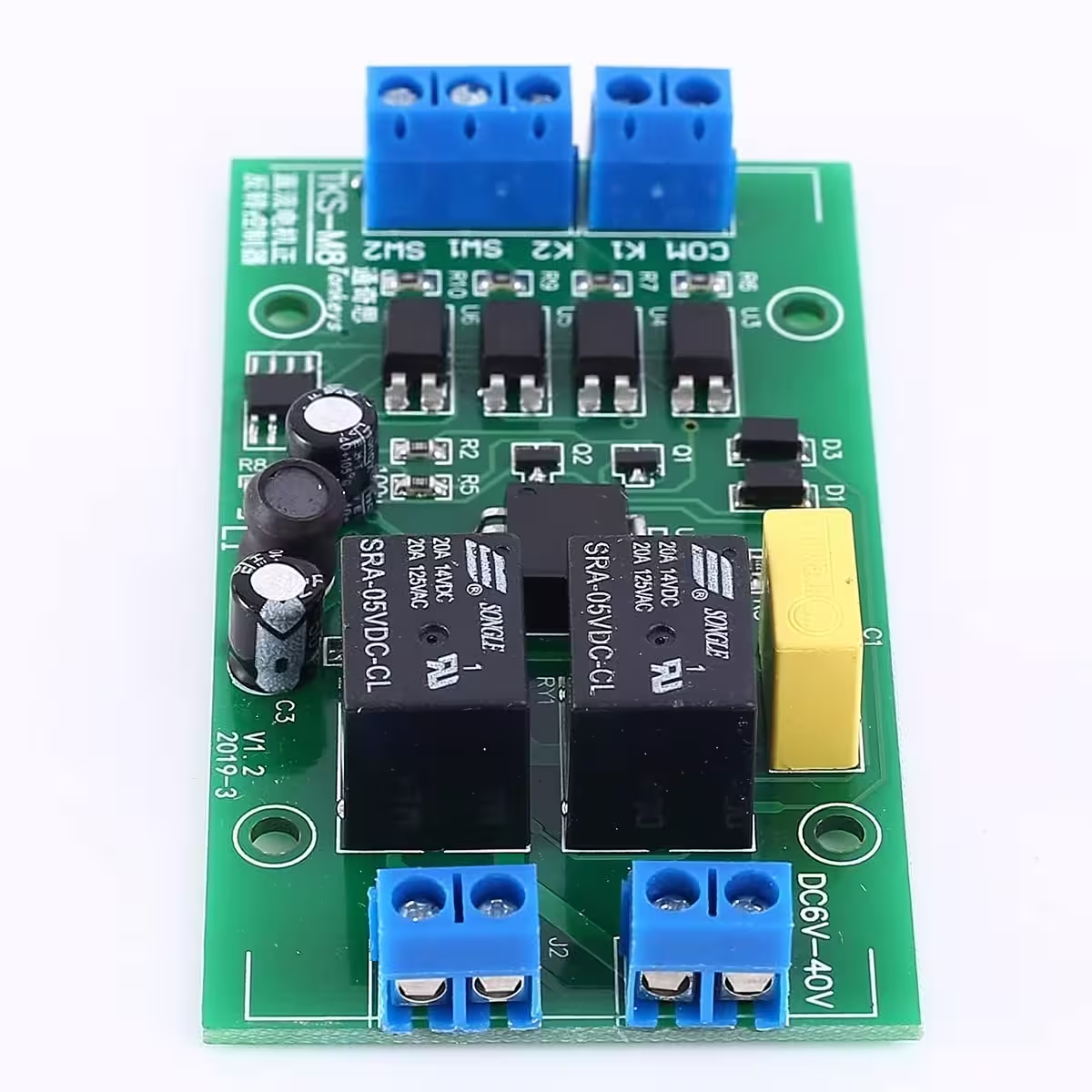
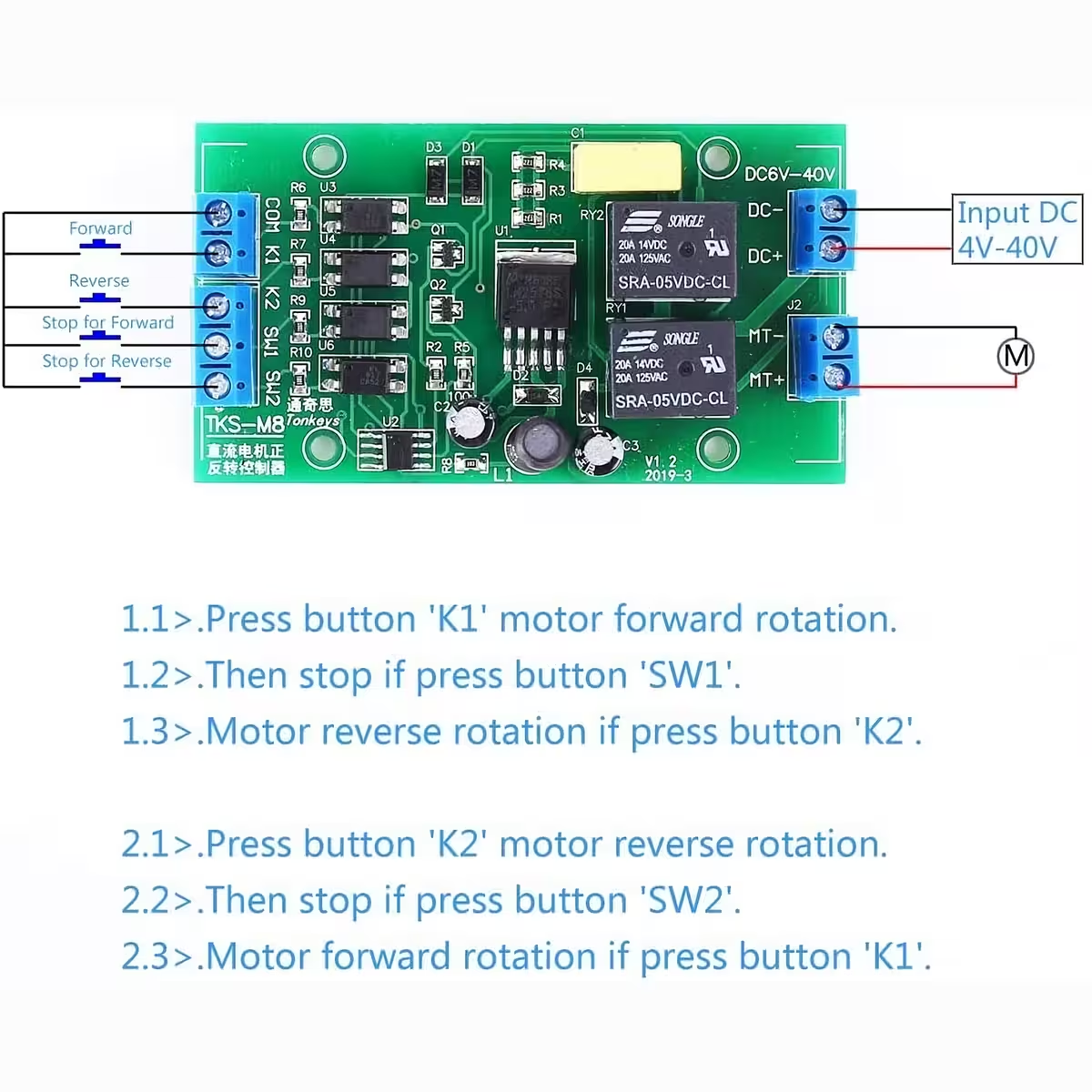
| Entrada K1 | Comando marcha adelante (active-low) |
| Entrada K2 | Comando marcha atrás (active-low) |
| SW1 | Final de carrera marcha adelante (se recomienda NO) |
| SW2 | Final de carrera marcha atrás (se recomienda NO) |
| VIN+ / VIN- | Alimentación del módulo DC 4–40V |
| Motor+ / Motor- | Salida hacia el motor DC |
Instrucciones de programación y uso
Modo PO (Auto-mantenimiento): Un pulso corto en K1 o K2 arranca el motor. Este continuará funcionando de forma autónoma hasta activar el final de carrera correspondiente o recibir el comando opuesto. Ideal para automatizaciones.
Modo P1 (Jog): El motor permanece activo solo mientras se mantenga pulsado el comando K1 o K2. Ideal para ajustes precisos y posicionamiento manual.
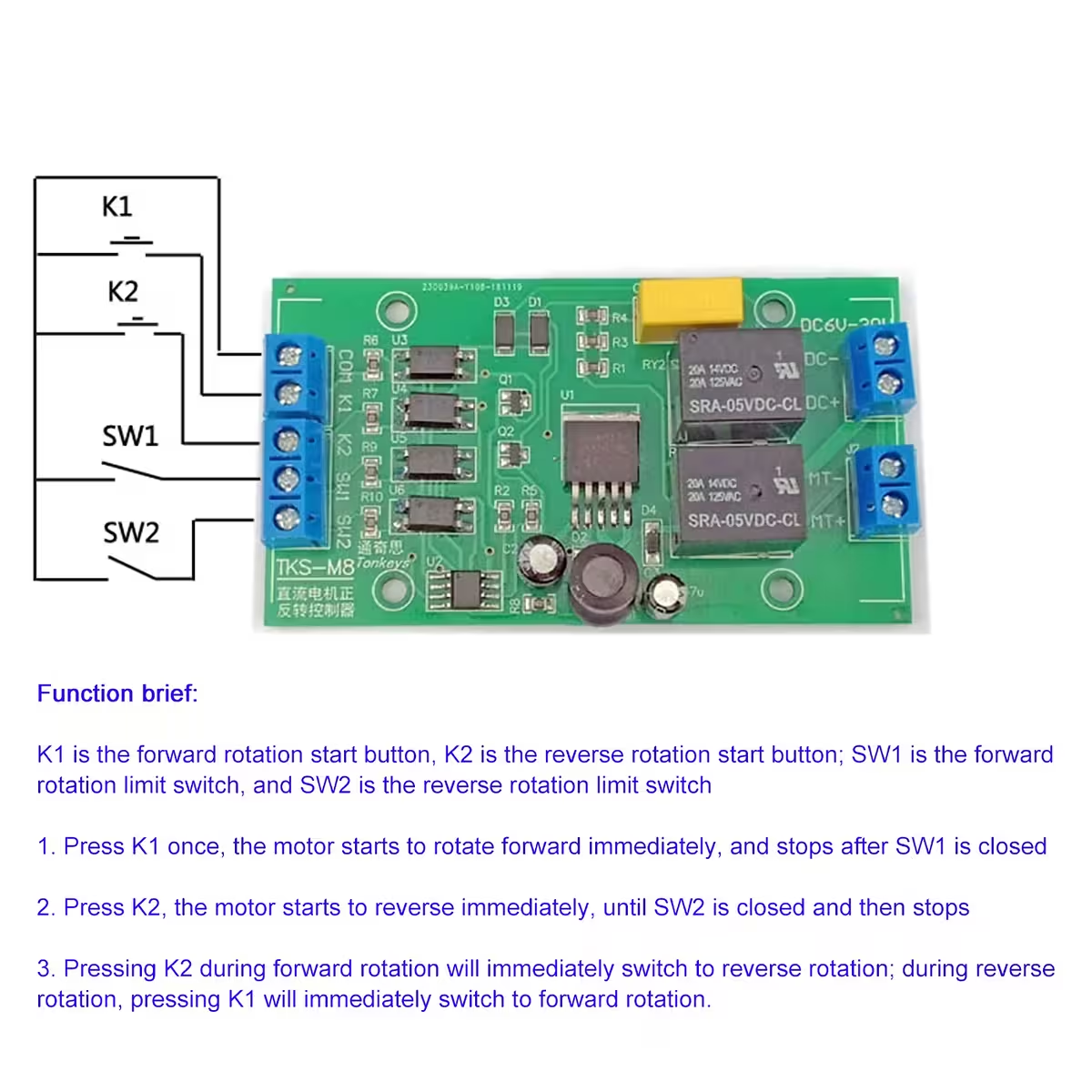
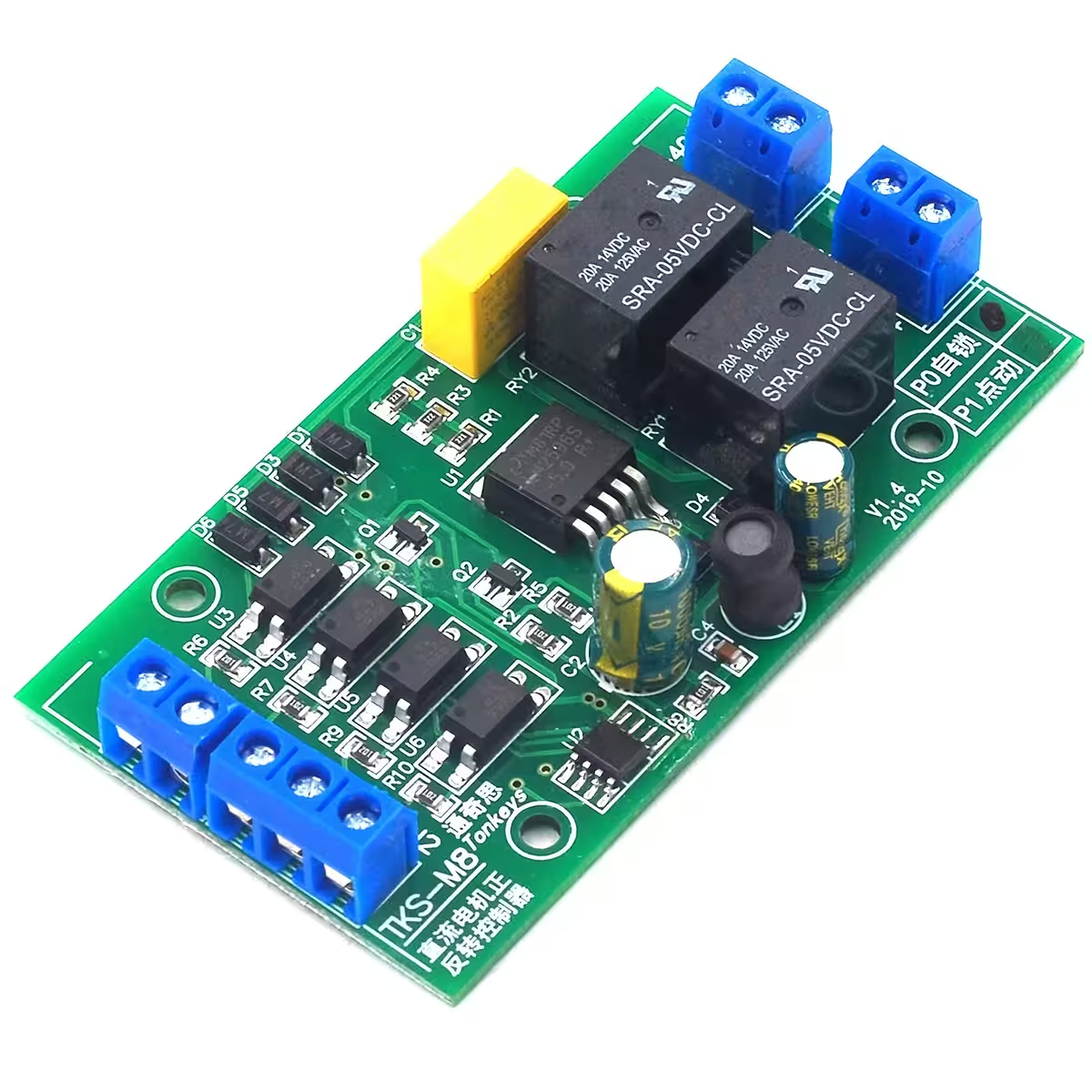
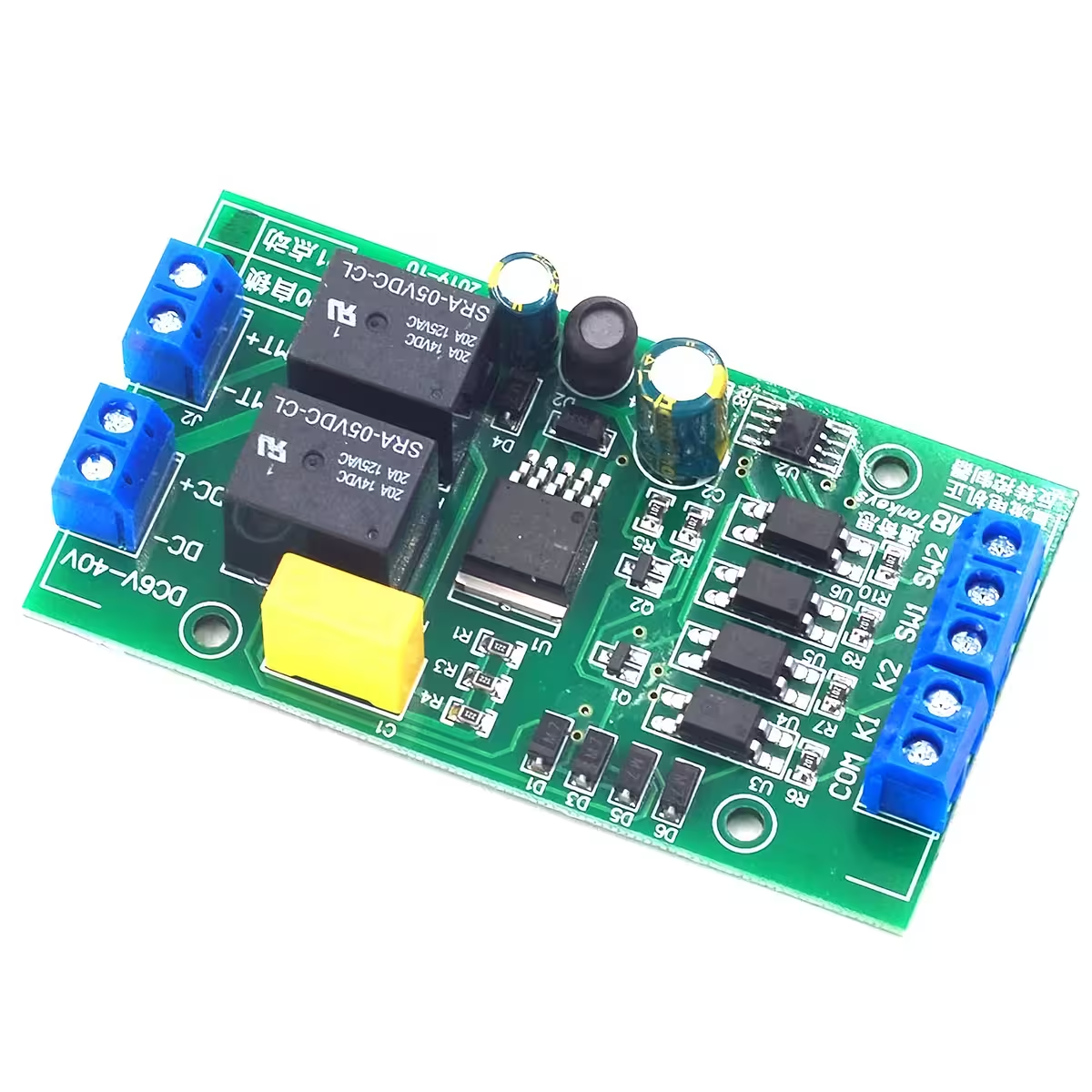
- Conecta la fuente de alimentación a VIN+ y VIN– (respeta la polaridad).
- Conecta el motor DC a Motor+ y Motor–.
- Selecciona el modo de funcionamiento: PO para auto-mantenimiento o P1 para modo jog.
- Conecta los pulsadores o señales de control a K1 (adelante) y K2 (atrás) — entradas active-low.
- Conecta opcionalmente los finales de carrera mecánicos o sensores NPN-NO a SW1 y SW2.
- Para movimiento automático cíclico A→B→A: conecta las salidas de los interruptores NO de la posición A a K1 y de la posición B a K2, dejando SW1/SW2 desconectados.
- Para integración con Arduino: conecta el GND de Arduino al GND del controlador, el pin digital de avance a K1 y el de retroceso a K2. Configura los pines como OUTPUT y escribe LOW para activar.
- Verifica la corriente de arranque del motor e instala un fusible adecuado en la línea de alimentación.
Contenido del paquete
- 1 × Controlador de dirección para motor DC (Forward / Reverse), modos PO/P1
Preguntas frecuentes
¿Qué significa active-low y por qué es importante?
La entrada se activa cuando el voltaje cae por debajo de 2V, es decir, cuando se conecta a masa (GND). Los pulsadores simples, finales de carrera NO y sensores NPN funcionan de esta manera. No necesitas resistencias adicionales ni lógica inversora.
¿Cuál es la diferencia entre el modo PO y el modo P1?
En el modo PO, un pulso corto en K1 o K2 arranca el motor y este sigue funcionando hasta el final de carrera o comando opuesto, ideal para automatismos. En el modo P1, el motor solo se mueve mientras mantienes el comando activo, perfecto para ajustes manuales.
¿Puedo conectar este controlador directamente a Arduino?
Sí. Conecta el GND de Arduino al GND del controlador y utiliza dos pines digitales configurados como OUTPUT. Cuando el pin está en LOW, el comando se activa. Arduino gestiona la lógica y el controlador la potencia, sin componentes intermedios.
¿Puedo usar finales de carrera con contacto normalmente cerrado (NC)?
El controlador está optimizado para finales de carrera NO (normalmente abiertos). Los contactos NC invierten la lógica y pueden causar un funcionamiento erróneo. Utiliza siempre contactos NO para SW1 y SW2.
¿Es necesario un disipador a máxima corriente?
Para corrientes cercanas a los 20A o ciclos de trabajo intensivos, asegúrate de que haya una ventilación adecuada y monitoriza la temperatura. En aplicaciones de uso continuo con carga elevada, un pequeño disipador o ventilación forzada prolongará significativamente la vida útil del módulo.
¿Cómo creo un movimiento automático cíclico sin temporizador?
Conecta los interruptores NO de la posición A a K1 y de la posición B a K2, dejando SW1 y SW2 desconectados. Al alcanzar cada extremo, el interruptor activará automáticamente el sentido opuesto, haciendo que el motor oscile continuamente sin intervención externa.
Video de presentación
Galería de fotos












Valoraciones
No hay valoraciones aún.