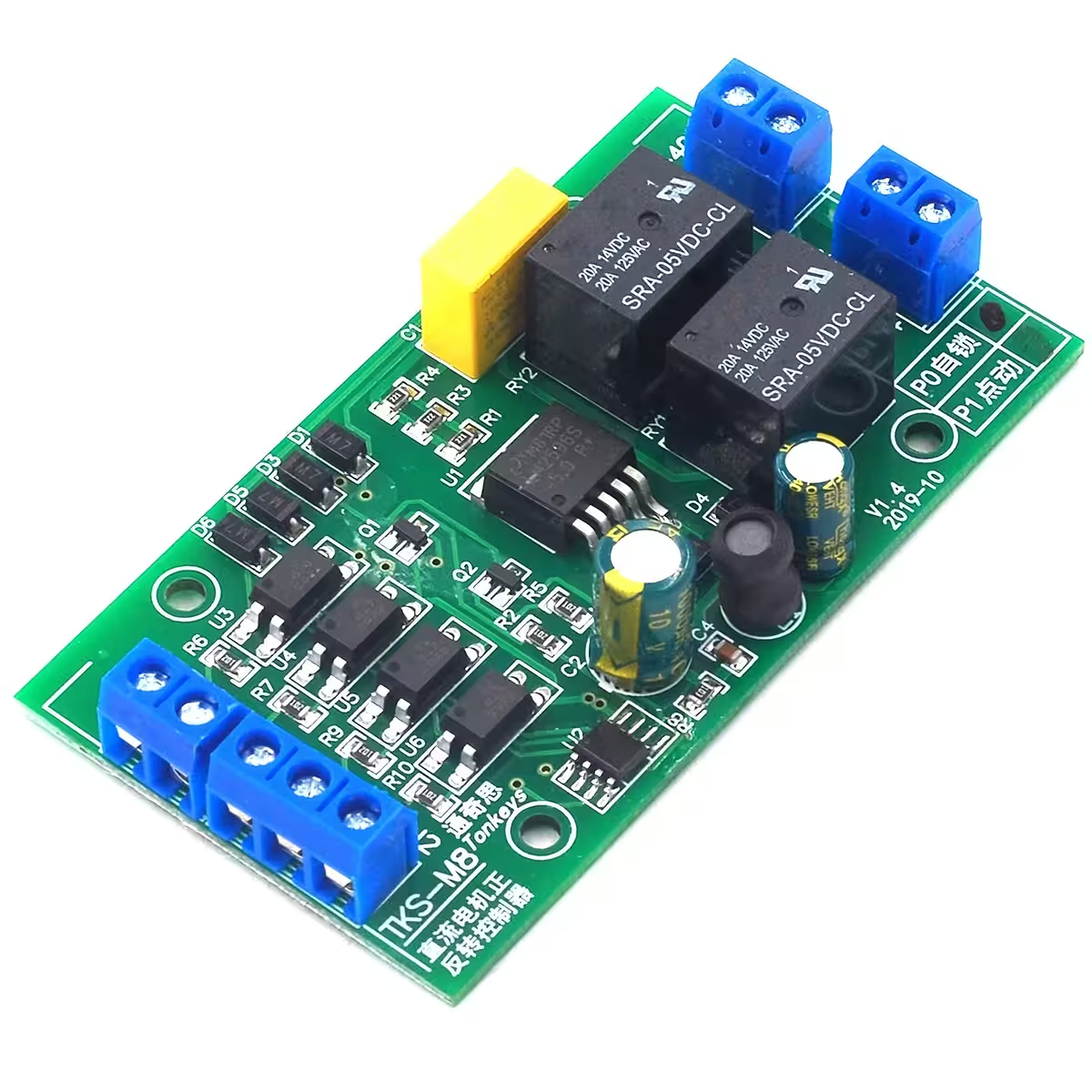
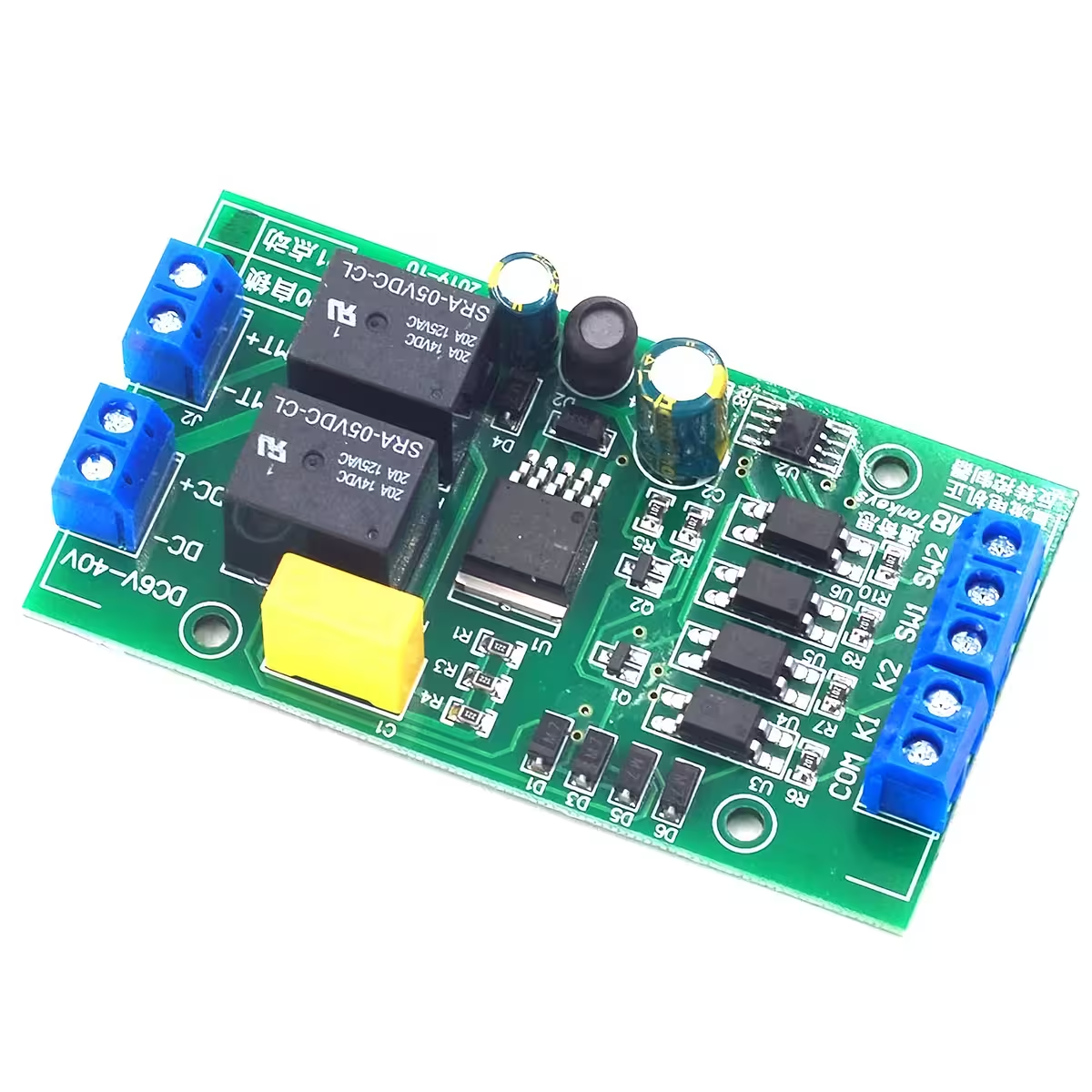
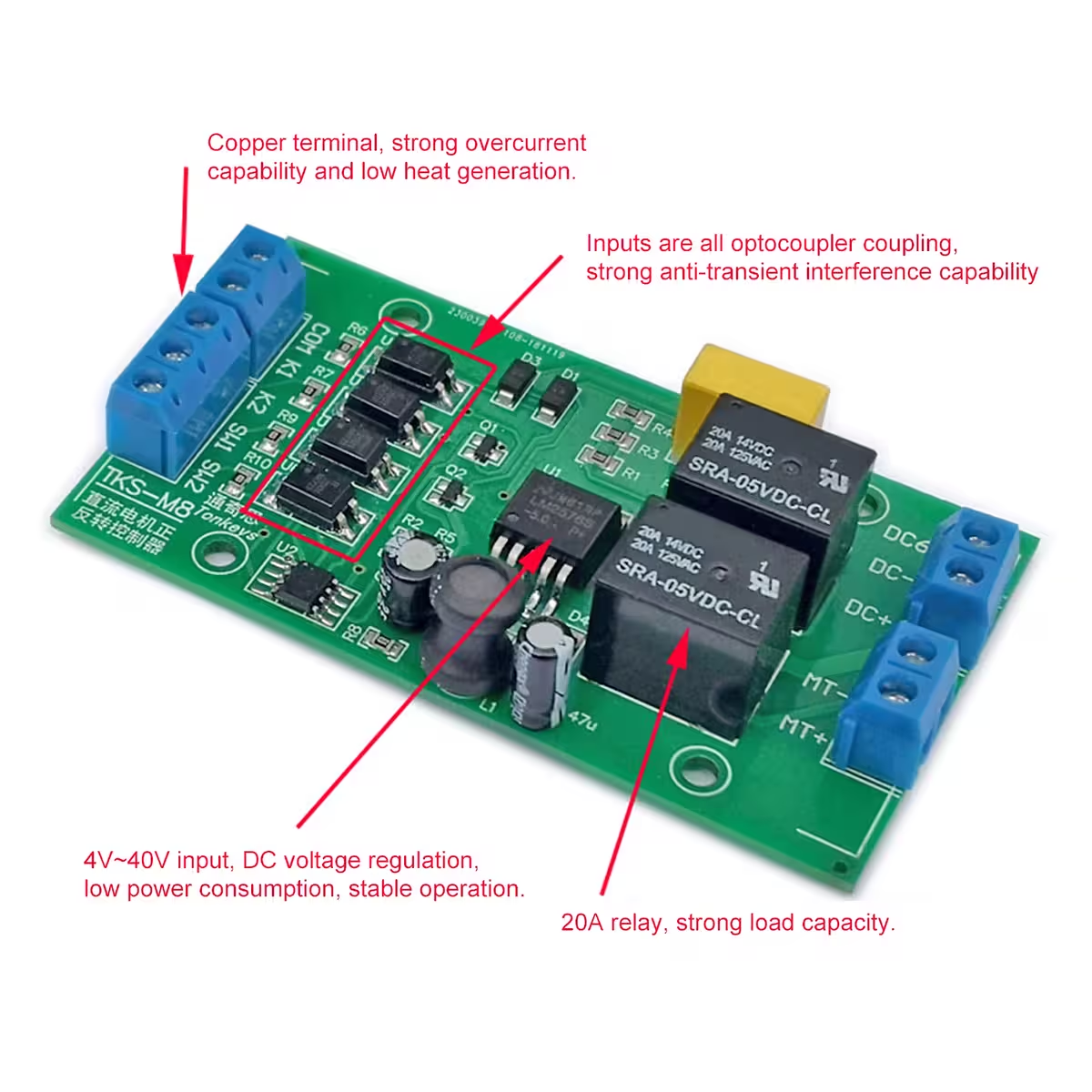
Controlador de dirección de motor – DC 4–40V, hasta 20A, modos PO/P1 con finales de carrera
Módulo compacto para el control de dirección de motores DC, ideal para sistemas con finales de carrera, actuadores, mecanismos lineales o proyectos DIY donde se necesitan funciones de avance y retroceso. Funciona en un rango muy amplio de voltaje, entre 4V y 40V, y para un funcionamiento estable se recomienda 6V–36V. El motor conectado recibe la misma tensión que la alimentación del módulo.
Especificaciones técnicas
Voltaje de trabajo: DC 4–40V (recomendado 6–36V)
Consumo del módulo: aprox. 0,6W sin motor, 0,1W en reposo
Corriente máxima de salida: hasta 20A
Vida útil: >150.000 ciclos
Potencia recomendada del motor: hasta ~80W
Tipo de entrada de señal: active-low (activo cuando voltaje < 2V)
Velocidad de respuesta: K1/K2 ≈ 20ms, SW1/SW2 ≈ 50ms
Modos de funcionamiento: PO (auto-retención) / P1 (jog)
Modos de funcionamiento PO y P1
PO (Estándar / Auto-retención): Un pulso corto en K1 o K2 inicia el motor y este sigue funcionando solo hasta el final de carrera o hasta recibir una orden contraria.
P1 (Jog): El motor funciona únicamente mientras la señal esté activa. Ideal para ajustes finos.
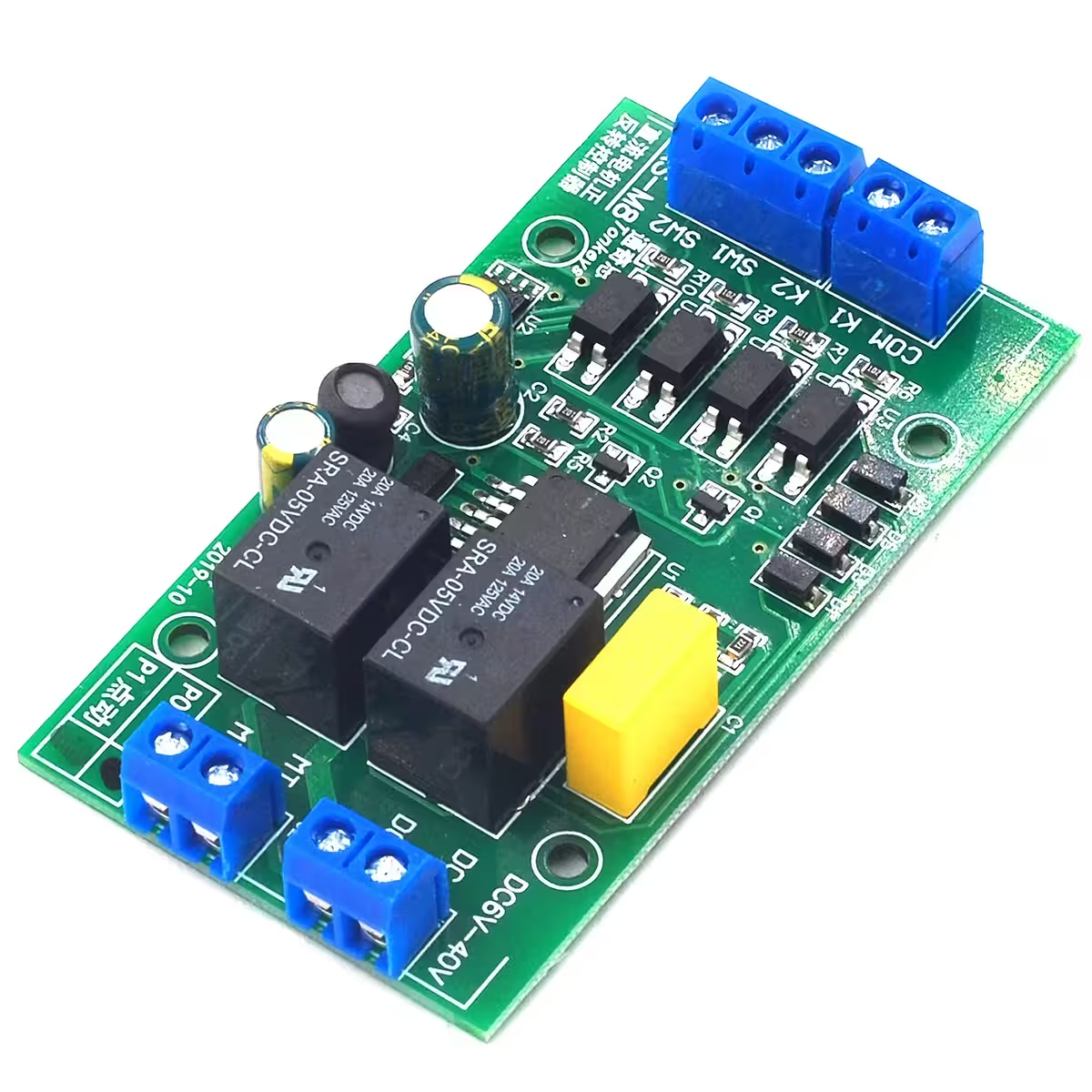
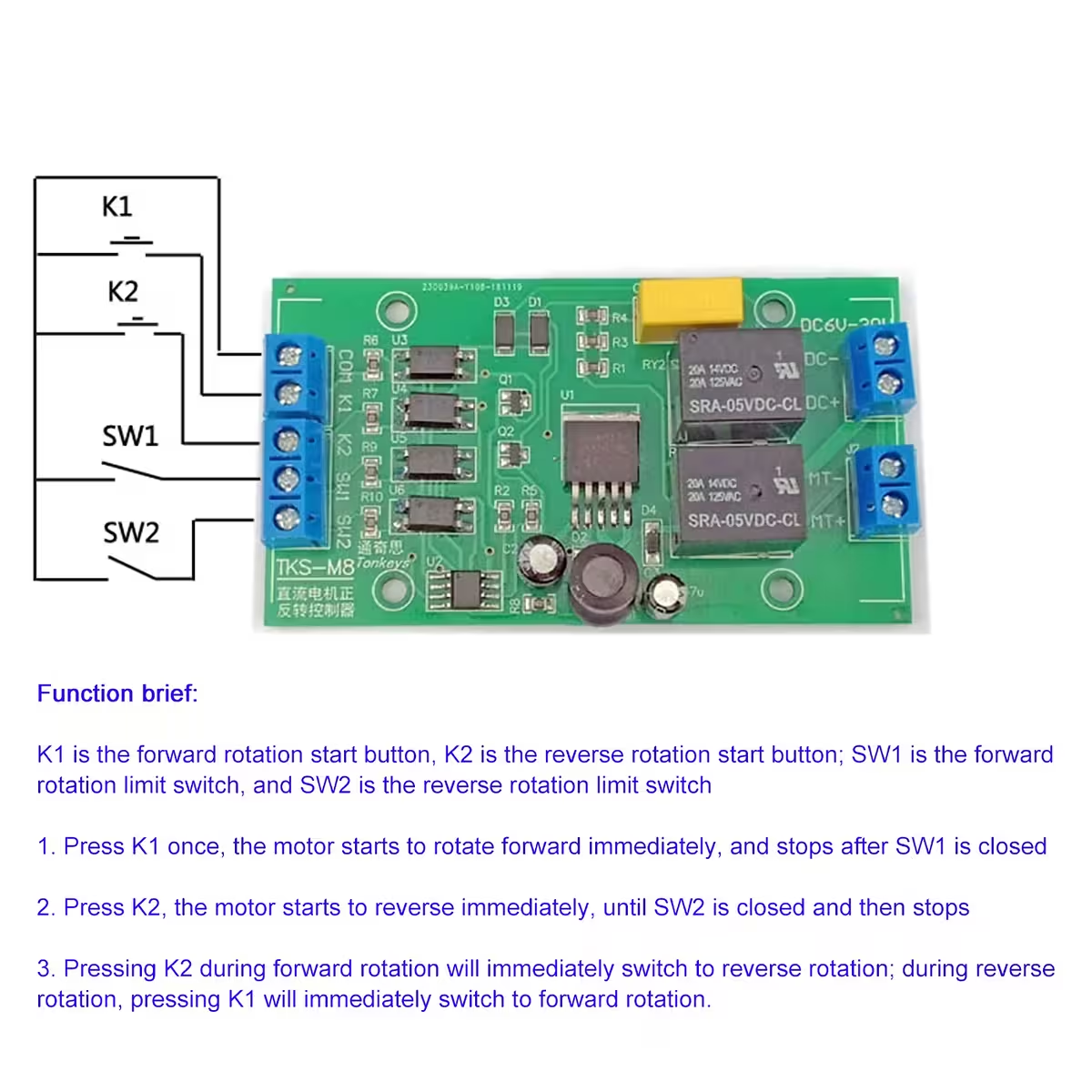
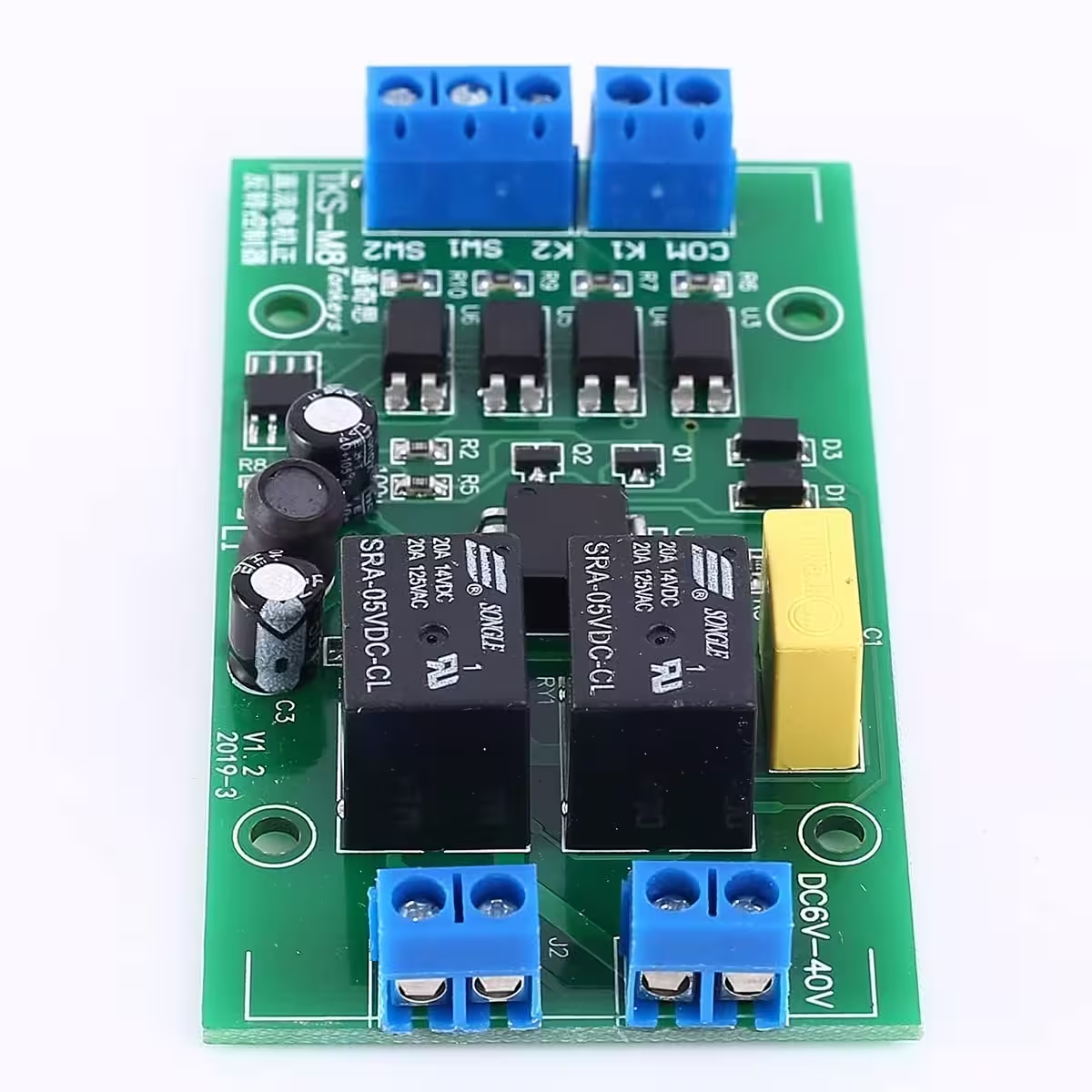
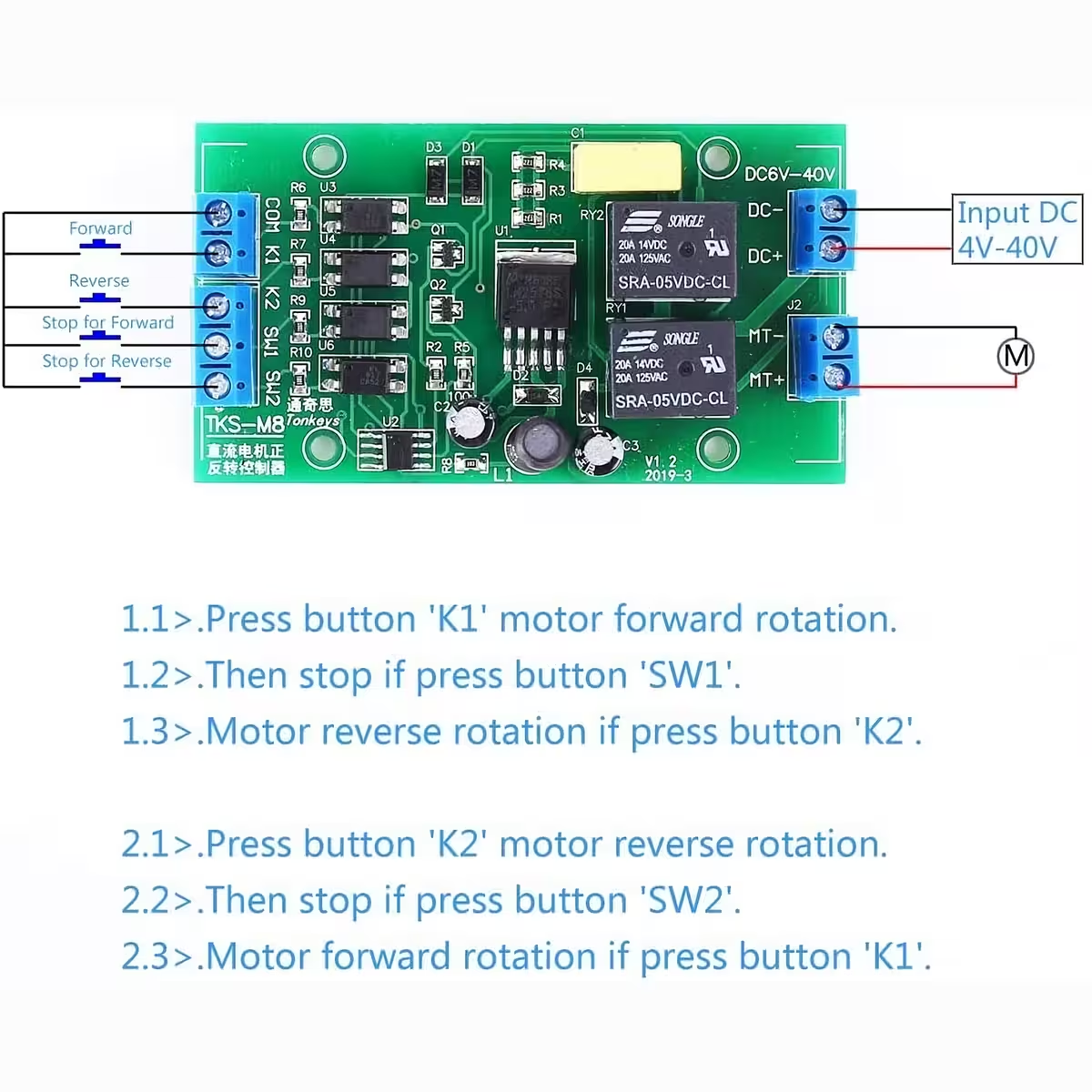
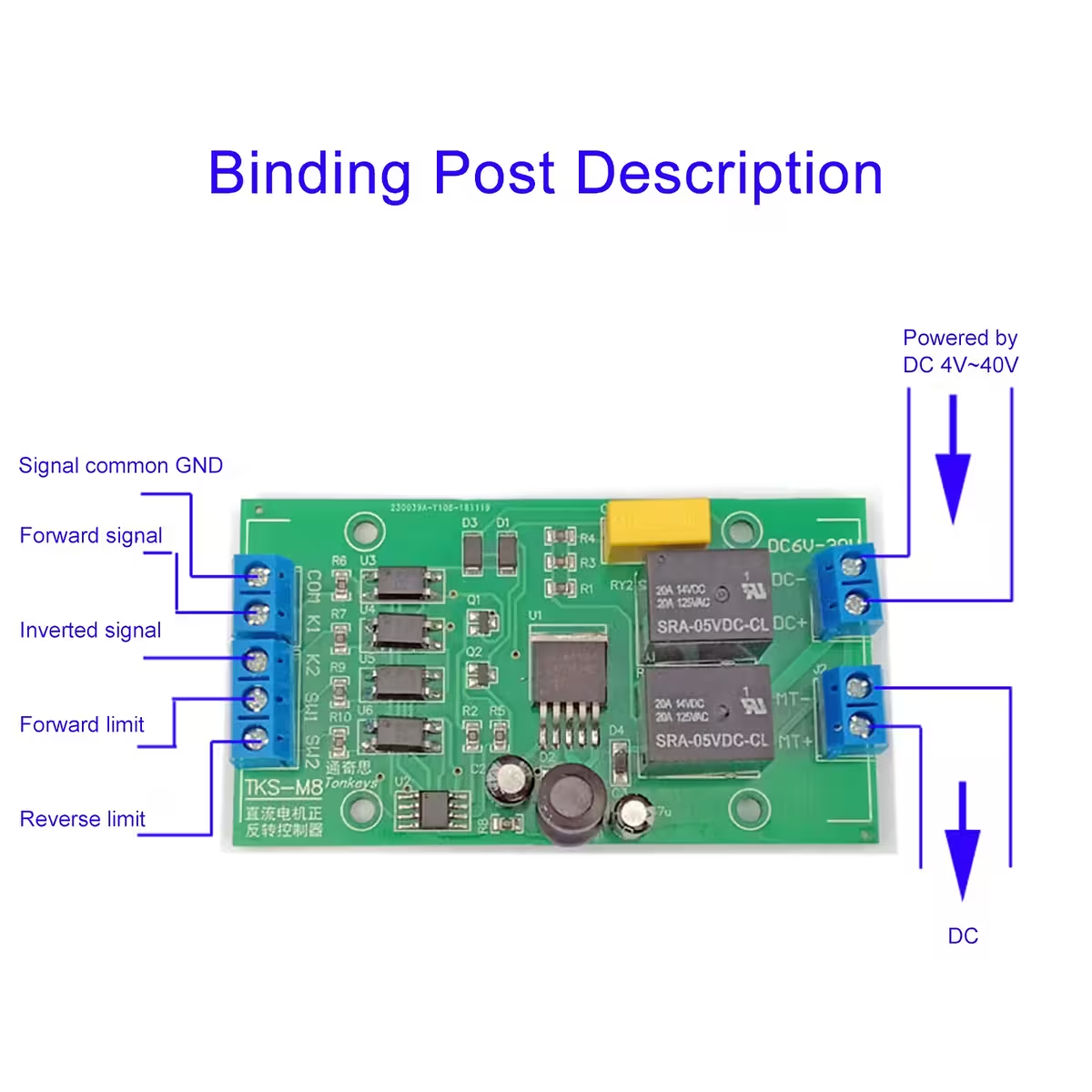
Entradas y finales de carrera
K1: comando avance (active-low)
K2: comando retroceso (active-low)
SW1: final de carrera avance (NO recomendado)
SW2: final de carrera retroceso (NO recomendado)
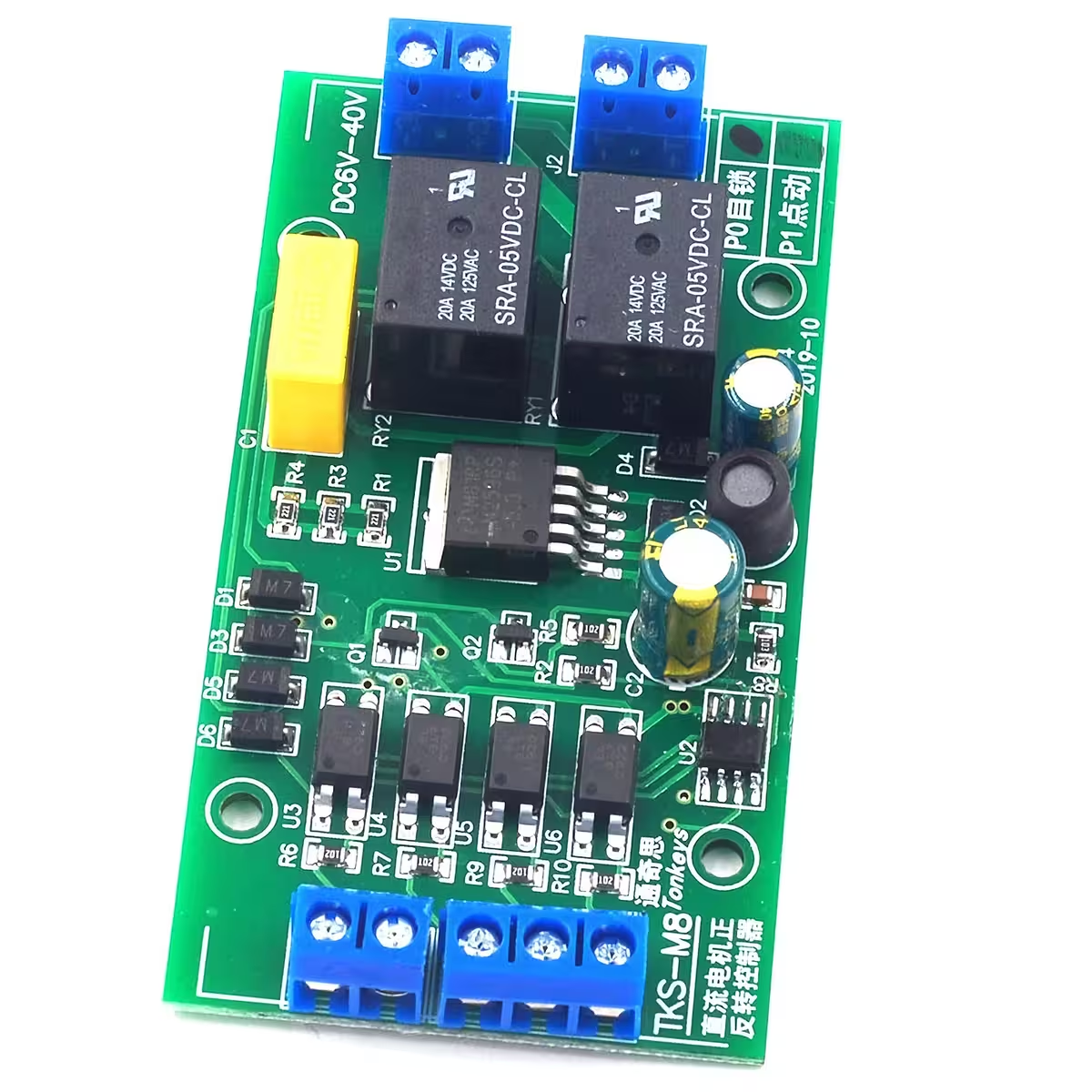
VIN+ / VIN-: alimentación del módulo (DC 4–40V)
Motor+ / Motor-: salida hacia el motor
Las entradas active-low permiten el uso de botones simples, finales de carrera mecánicos o sensores NPN-NO (con 3 cables).
Funcionalidad con finales de carrera y movimiento automático
SW1 y SW2 actúan como paradas de seguridad: si se activan, el motor se detiene instantáneamente. Se puede crear movimiento automático entre dos puntos sin temporizador interno:
Punto A → conectado a K1
Punto B → conectado a K2
SW1 y SW2 no conectadas
Interruptores NO en posiciones A y B
El motor funcionará continuamente A → B → A → B en un ciclo repetitivo.
Opción temporizador / relé de tiempo
El controlador puede combinarse con un temporizador para definir exactamente cuánto tiempo avanza y retrocede el motor. Esto permite ciclos automáticos precisos sin intervención manual. Se pueden usar temporizadores simples (IN+/IN–, O+/O–) o modelos con VCC, S1, S2.
Compatibilidad con Arduino – control avanzado y automatización
El módulo funciona perfectamente con Arduino ya que las entradas K1 y K2 son active-low, es decir, se activan al conectarlas a GND. En este caso, Arduino puede controlar la dirección del motor con solo dos pines digitales, mientras el controlador se encarga de toda la conmutación de corriente.
Cómo conectar Arduino al controlador
Arduino GND → GND del controlador (obligatorio)
Pin digital Arduino → K1 (avance)
Pin digital Arduino → K2 (retroceso)
Los finales SW1/SW2 se pueden usar directamente en el controlador o leer desde Arduino.
Qué puedes hacer con Arduino
Definir exactamente cuántos segundos avanza
Definir cuántos segundos retrocede
Configurar pausas entre ciclos
Establecer número de ciclos
Parada en finales de carrera
Aceleración, desaceleración, rampas
Lectura de sensores (corriente, posición, obstáculos, finales de carrera)
Arduino se convierte en el “cerebro” de la automatización, mientras que el controlador sigue encargado de la conmutación de potencia al motor. La combinación es ideal para proyectos avanzados y sistemas completamente programables.
Rendimiento y recomendaciones
A 12V – corriente máxima 20A
A 24V – corriente útil ~10A
Verificar la corriente de arranque del motor
Usar cables y conectores adecuados
Se recomienda fusible para protección
Contenido del paquete
1 × Controlador de dirección de motor (Forward / Reverse)
Video de presentación
Galería de fotos
Valoraciones
No hay valoraciones aún.
Sé el primero en valorar “Controlador Motor DC 12V/24V con Reverso – Cambio de Sentido Motor DC, Control Manual o Automático Adelante/Atrás” Cancelar la respuesta















Valoraciones
No hay valoraciones aún.